Forerunner General-Purpose Humanoid Robot

The Kepler Forerunner series of general-purpose humanoid robots feature a proprietary planetary roller screw actuator, an intelligent dexterous hand, and the NEBULA system, which is designed for versatility across multiple application scenarios and collaborative platforms.
The series consists of 3 distinct models: K1, S1, and D1, each standing at a height of 70 in. (2 m) and weighing 187 lb. (85 kg).
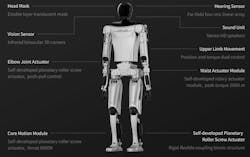
The planetary roller screw and rotary actuators are key to the dynamic movement of the robot's limbs. This allows for an enhanced maximum load capacity for each component and enables the simulation of human muscle movement control with exceptional precision. The dexterous hand, considered one of the most challenging components of a humanoid robot, is a Kepler innovation with 12 DoF, adeptly balancing load capacity and control accuracy.

The software that forms the NEBULA system enables the robot to interact with the surrounding environment, addressing challenges in visual, auditory, and sensory perception. By integrating a motherboard with a processor providing 100 TOPS of computing performance into the NEBULA system, the actuator boasts four primary functions: visual recognition, visual SLAM (Simultaneous Localization and Mapping), multimodal interaction, and hand-eye coordination. Furthermore, Kepler has equipped the humanoid robot with a cloud-based multimodal large model while simultaneously deploying a smaller, industry-specific model on the robot itself for quicker response times.

The robot, designed for multifunctional use, is adept at operating in various settings, including education and research, automated production lines, intelligent material handling, complex environment inspections, emergency rescue services, outdoor safety operations, and detection of concealed safety hazards. Additionally, Kepler provides customized robots tailored to customer needs, allowing for an even broader range of applications.
The Kepler Forerunner series is equipped with a power system that employs planetary roller screw actuator and rotary actuator technology, enabling the robots to rival global competitors in full-body mobility, manual dexterity, hand-eye coordination, and visual perception and recognition capabilities.
Kepler anticipates commencing mass production of its humanoid robots in the second half of 2024, with an estimated retail price range of $20,000 to $30,000.
In addition, the firm has introduced the Kepler OS, a global developer platform that provides comprehensive development interfaces, reference projects, and extensive documentation. The platform facilitates coordination between multiple robots and offers robust online development and debugging capabilities.
Looking ahead, Kepler aims to collaborate with global developers on the Kepler OS platform to further the intelligent development of research and industry applications, contributing to the growth of the global humanoid robot market.
Features:
- Visual perception recognition
- Flexible hand control
- Walking on complex terrain
- Hand-eye coordination
- Powerful load carrying
- Multiple application roles
- 100 TOPS Computing Power Computing Power per Second
- 40 Degrees of Freedom
- 70 in. (2 m) height
- 187 lb. (85 kg) weight
Kepler Exploration Robot Co., Ltd.
Shanghai, China
[email protected]
www.gotokepler.com